 |
Das war der erste funktionierende Direktantrieb nach vielen Versuchen im „Blade CP“. (3 Statorpakete 12N16P á 1,5mm eines Panasonic Diskettenlaufwerks, bewickelt mit 55 Wdg. 0,35 CuL und im Dreieck verschaltet, betrieben mit einem 1300-er 3S). |
 |
Und es passt gerade so alles zusammen. |
 |
Und dann die nächste Evolutionsstufe im „geräumigen“ Twister 3D. Da war eine Menge Platz unter dem alten Zahnrad und es war mein erster Heli in T.-Rex – Größe. Diesen Heli hatte ich mir extra geordert, um mit einem geeigneten Direktantrieb für den zukünftigen Rex zu experimentieren…
Und dann war es endlich soweit !!! |
 |
Der Ausgangspunkt, ein 12N Statorpaket mit einer Höhe von 2,5mm (5 Bleche á 0,5mm). Vier dieser Pakete übereinander gelegt(11mm) müssten genug Leistung bringen. DAuch der Durchmesser sollte bestimmt genügend Drehmoment erzeugen können. Die den Wickelraum schmälernden Zwischenstege habe ich einfach mit einer Laubsäge entfernt. |
 |
Der innere Teil des Stators musste ein wenig „frei“ gedreht werden, um dem Freilauf Platz zu schaffen Die doppelten Muttern schaffen den Freiraum zum Montageblech. Bewickelt mit je 23 Wdg. 0,8 CuLL ganz einfach ABCABCABCABC und im Dreieck geschaltet |
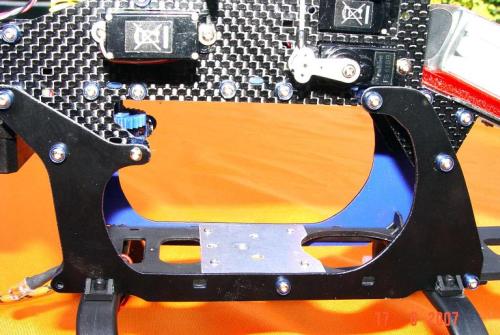 |
Das Chassisunterteil wurde aus 1mm GFK wieder mit der Laubsäge geschnitten, um genügend Platz zu haben. (über eine Fräse kann ich leider nicht verfügen) |
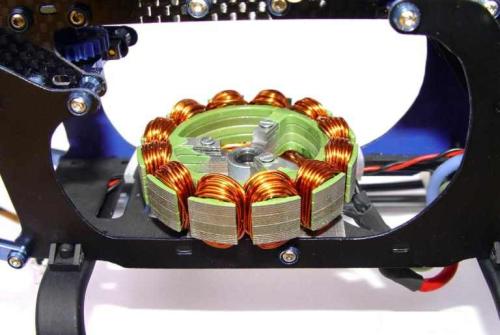 |
Der Stator ist montiert. |
 |
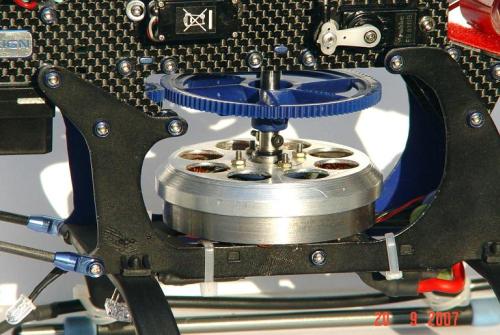
Die Glocke ist mit 32 Magneten N52 (12x4x1,5 /je zwei kaskadiert) bestückt und mit Loctite fixiert,
der Rückschlussring ist in den selbst gedrehten Alumiumträger eingepresst. Es wurde der originale T-Rex Freilauf verwendet, der übrigens „made in germany“ ist! Der komplette Motor wiegt jetzt ziemlich genau 200g. |
 |
Und jetzt kann es losgehen, und „der Vogel fliegt“ – ist aber irgendwie immer noch zu laut… Also weitergrübeln… Riemenrad für’s Heck, separater Heckmotor ??? |
 |
Die Lösung: Erstmal das letzte Zahnrad weg, die ganze Heckantriebsmechanik raus, Gewicht muss auch weg. |
 |
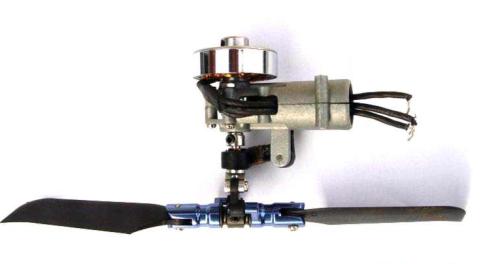
Ein kleiner „Pichler“ (auch 12N16P) muss es richten, aber wie den da hinten dran bekommen… der 8mm Ansatz des Motors passt prima in den Lagersitz des Hecktrotorgehäuses (hier erstmal zur Probe die alte Plastikversion davon, eine Seite sauber aufgebohrt. Motor von hinten durch und das Wellengehäuse mit einer 1-Ohr-Klemme fixiert. klappt, und funktioniert. Als Motorwelle musste eine etwas längere Welle aus einem CDR-Laufwerk herhalten, sonst hätte der Pitchweg des Heckrotors nicht ausgereicht. |
 |
Das Heck ist fertig montiert, die Motorleitungen (3x0,5mm²) verlaufen im Heckrohr. Inzwischen ist am Heck auch das originale schicke Aluteil verbaut. Der Heckmotor wird jetzt von einem zusätzlichen Regler (dem „Jeti 18 Heli“ aus meinem alten „Blade CP“) gespeist. Dieser ist über ein Y-Servo-Kabel direkt am Eingang des Jazz 40 für den Hauptmotor angeschlossen, so ist auch eine proportionale Drehzahl zum Hauptmotor gewährleistet. Mit fortschreitenden „Flugfertigkeiten“ wuchs jedoch der Wunsch nach einem agileren Flugverhalten, es lag auf der Hand, der Motor musste etwas leichter werden und oben montiert werden… |
 |
Der neue Stator hat jetzt nur noch 3 Pakete, bewickelt mit 26 Wdg 0,71 CuLL. Das reicht voll aus auch für zügigen Flug mit kräftigen Manövern bei bis zu 3.000 rpm mit Loops, Rollen und was sonst noch so dazu gehört. Der Heckmotor zieht seine ca. 2A separat, je nach Drehzahl, bei Heck-Vollpitch gehen max. 5A über den Heckmotor. Der Hauptmotor wiegt nur noch knapp 160g. Der Heli komplett wiegt jetzt gut. 900g und fliegt sich prima. Die Wicklungstemparatur beträgt nach 10 min und normalem schnellen Rundflug mit Vollpitcheinlagen, Loops und Rollen ca. Umgebungstemperatur + 25…30K. Damit kann man leben, denke ich. |
 |
Als lästig hat sich jedoch die Tatsache erwiesen, dass eine spezielle Hauptwelle benötigt wird. Sie ist länger als die originale und die zwar preisgünstigen Wellen im Handel sind relativ weich und nicht immer so gerade, wie sie eigentlich sein sollten. Daher arbeite ich derzeit an einem noch flacheren Motor, um dann wieder die präzisere und härtere Originalwelle verwenden zu können. In weiterer Zukunft plane ich auch, einen Direktantrieb für meinen LOGO zu bauen… |
| Hier ein Log bei zunächst mit 2.440 rpm, dann mit 2.850 rpm (reiner Schwebeflug)
 |
|
| Ein Video mit dem direkten Vergleich der beiden Antriebsvarianten (originaler Heckantrieb im Teil 1 und komplett zahnlos im Teil 2) ist unter http://www.weltec.de/pics2/T-Rex450 - Direktantrieb.wmv in hoher Qualität bzw. bei RC-Movie hier zu finden. | |